Matrices et géométrie
Les transformations du plan à l’aide de matrices font partie du programme de terminale générale (maths expertes). C’est un point un peu particulier qui n’appelle aucun prolongement dans le programme du lycée. De ce fait, il est traité de façon très différente d’un enseignant à l’autre et même d’un manuel à l’autre.
Si vous êtes curieux, lisez la page sur les transformations dans le plan complexe. Vous verrez comment ce thème était abordé au lycée il y a quelques années...
Définitions
Soit un plan muni d’un repère orthonormé.
Une application plane est une fonction qui à tout point \(M(x\, ;y)\) du plan associe un unique point image \(M’(x’\, ;y’)\) de ce plan. Vous retrouvez ce que vous avez appris en seconde sur les fonctions mais cette fois en l’appliquant au plan.
Une application \(f\) du plan sur lui-même est une transformation si pour tout point \(M’\) il existe un unique point \(M\) tel que \(M’ = f(M).\) Pour illustrer, figurez-vous une photo traitée par un logiciel de façon à inverser l’image (les pixels situés à gauche migrent à droite et inversement). La photo est transformée.

Si \(f(M) = M,\) le point \(M\) est dit invariant.
Ci-dessous, \(a,\) et \(b\) sont des réels.
Une translation de vecteur \(\overrightarrow t \left( {\begin{array}{*{20}{c}}
a\\
b
\end{array}} \right)\) qui à tout point \(M(x\, ;y)\) associe un point \(M’(x’\, ;y’)\) peut être définie comme une somme de deux matrices colonnes.
\(\left( {\begin{array}{*{20}{c}}
{x'}\\
{y'}
\end{array}} \right) = \left( {\begin{array}{*{20}{c}}
x\\
y
\end{array}} \right) + \left( {\begin{array}{*{20}{c}}
a\\
b
\end{array}} \right)\)
Matrice de transformation
Les autres transformations nécessitent un produit matriciel.
Soit \(T\) une matrice \(2 \times 2\) dont le déterminant est non nul telle que \(M’ = T \times M.\)
\(T\) est une matrice de transformation. Certaines valeurs de \(T\) sont remarquables.
Symétrie axiale par rapport à l’axe des abscisses : \(T = \left( {\begin{array}{*{20}{c}}
1&0\\
0&{ - 1}
\end{array}} \right)\)
Symétrie axiale par rapport à l’axe des ordonnées : \(T = \left( {\begin{array}{*{20}{c}}
{ - 1}&0\\
0&1
\end{array}} \right)\)
Homothétie de centre \(O\) et de rapport \(k\) : \(T = \left( {\begin{array}{*{20}{c}}
k&0\\
0&k
\end{array}} \right)\)
Rotation de centre \(O\) et d’angle \(\theta\) : \(T = \left( {\begin{array}{*{20}{c}}
{\cos \theta }&{ - \sin \theta }\\
{\sin \theta }&{\cos \theta }
\end{array}} \right)\)
Rotation de centre \(\Omega (x_1\, ;y_1)\) et d’angle \(\theta\) :
\(\left( {\begin{array}{*{20}{c}}
{x' - {x_1}}\\
{y' - {y_1}}
\end{array}} \right) = \left( {\begin{array}{*{20}{c}}
{\cos \theta }&{ - \sin \theta }\\
{\sin \theta }&{\cos \theta }
\end{array}} \right)\left( {\begin{array}{*{20}{c}}
{x - {x_1}}\\
{y - {y_1}}
\end{array}} \right)\)
Exemple
Soit le point \(P(3\, ;4)\) dans le plan muni d’un repère orthonormé.
Déterminons les coordonnées du point \(P’(x\, ;y),\) image de \(P\) par une rotation de centre \(O\) d’un quart de tour dans le sens trigonométrique.
L’exercice n’est pas difficile. La rotation correspond à un angle de \(\frac{\pi}{2}.\)
Soit \(T\) la matrice de transformation.
\(T = \left( {\begin{array}{*{20}{c}}
{\cos \frac{\pi }{2}}&{ - \sin \frac{\pi }{2}}\\
{\sin \frac{\pi }{2}}&{\cos \frac{\pi }{2}}
\end{array}} \right) = \left( {\begin{array}{*{20}{c}}
0&{ - 1}\\
1&0
\end{array}} \right)\)
\(P’ = TP\)
\(\Leftrightarrow \left( {\begin{array}{*{20}{c}}
x\\
y
\end{array}} \right) = \left( {\begin{array}{*{20}{c}}
0&{ - 1}\\
1&0
\end{array}} \right)\left( {\begin{array}{*{20}{c}}
3\\
4
\end{array}} \right)\)
D’où \(x = -4\) et \(y = 3\) donc \(P'(-4\, ;3).\)
Vérifions notre rotation d’un quart de tour avec GeoGebra.
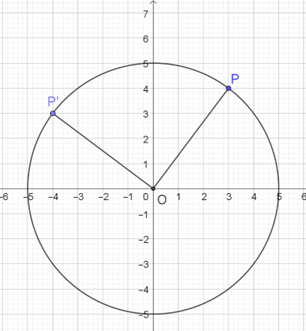
C'est parfait !
