Équations cartésiennes (terminale)
L’étude des équations cartésiennes d’une droite dans le plan est un grand bonheur de l’année de maths de seconde. L’allégresse se poursuit en terminale générale avec les équations cartésiennes dans l’espace : celles des plans et celles des droites.
L’équation cartésienne d’un plan
Vous le savez certainement, un plan dans l’espace peut être défini par un point et deux vecteurs non colinéaires (deux vecteurs étant toujours coplanaires).
Mais un plan peut aussi être défini plus sobrement : par un point et un seul vecteur non nul qui lui est normal. Illustration.
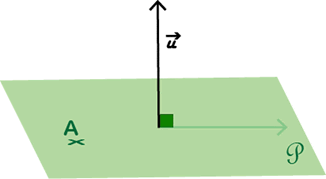
\(A\) est un point connu du plan \(\left( \mathscr{P} \right)\). Soit \(M(x\,;y\,;z)\) n’importe quel point de ce plan. Fort logiquement, il doit vérifier l’équation \(\overrightarrow {AM} .\overrightarrow u = 0\) (produit scalaire nul)
Le vecteur normal à \(\left( \mathscr{P} \right)\) a pour coordonnées \(\overrightarrow u \left( {\begin{array}{*{20}{c}} a\\ b\\ c \end{array}} \right)\)
Nous avons donc \(\left( {\begin{array}{*{20}{c}} {x - {x_A}}\\ {y - {y_A}}\\ {z - {z_A}} \end{array}} \right).\left( {\begin{array}{*{20}{c}} a\\ b\\ c \end{array}} \right) = 0\)
\(\begin{array}{l} \Leftrightarrow a(x - {x_A}) + b(y - {y_A}) + c(z - {z_A}) = 0\\ \Leftrightarrow ax - a{x_A} + by - b{y_A} + cz - c{z_A} = 0 \end{array}\)
Soit \(d = - a{x_A} - b{y_A} - c{z_A}\). Nous obtenons alors une équation du plan \(\left( \mathscr{P} \right)\) de la forme \(ax + by + cz + d\) \(= 0\) (avec \(a\), \(b\) et \(c\) non tous nuls).
Donc, théorème : l’ensemble des points \(M\) de coordonnées \((x\,;y\,;z)\) vérifiant l’équation \(ax + by + cz + d\) \(= 0\) est un plan (avec \(a\), \(b\) et \(c\) non tous nuls).
Réciproquement, tout plan de l’espace admet une équation de la forme \(ax + by + cz + d\) \(= 0.\)
Pour les applications, voir la page d’exercices sur les équations cartésiennes d’un plan.
Intersections (ou non) de plans
Soit deux plans, \(\left( {\mathscr{P_1}} \right)\) tel que \(ax + by + cz + d\) \(= 0\) et \(\left( {\mathscr{P_2}} \right)\) tel que \(a’x + b’y + c’z + d’\) \(= 0.\)
S’il existe un réel \(k\) tel que \(a=ka’\), \(b=kb’\) et \(c=kc’\) alors les plans sont parallèles.
Si \(aa’+bb’+cc’=0\), alors les plans sont orthogonaux.
Mais ce ne sont pas les cas que l’on rencontre le plus souvent. Aussi allons-nous nous attarder sur le système d’équations cartésiennes d’une droite.
Vous savez peut-être qu’une droite dans l’espace peut être définie par une représentation paramétrique. Mais il existe une autre façon de la caractériser.
Une droite dans l’espace est l’intersection de deux plans qui ne sont ni parallèles ni confondus (voir la page plans sécants dans l’espace). Par conséquent, un second moyen de définir une droite est un système de deux équations de plans. Tout simplement.
\(\left\{ {\begin{array}{*{20}{c}} {ax + by + cz + d = 0}\\ {a'x + b'y + c'z + d' = 0} \end{array}} \right.\)
Cas particulier : l’axe \((Ox)\) admet comme système d’équations cartésiennes \(\left\{ {\begin{array}{*{20}{c}} {y = 0}\\ {z = 0} \end{array}} \right.\)
Vous devinez sans mal quels sont les systèmes d’équations des deux autres axes.
Équation d’une sphère
Outre les équations de droites et de plans, vous pouvez rencontrer des équations de sphères. Elles sont du type \(a{x^2} + b{y^2} + c{z^2} + dx\) \(+ ey + fz + g\) \(= 0.\)
Exercice
Soit un espace muni d'un repère orthonormé \((O\,;\overrightarrow i ,\overrightarrow j ,\overrightarrow k ).\) Soit les points \(A(1\,;2\,;3)\), \(B(-1\,;2\,;0)\) et \(C(2\,;1\,;-2\)).
Vérifier que les points \(A\), \(B\) et \(C\) définissent un plan dont on donnera une équation.
Corrigé
\(\overrightarrow {AB} \left( {\begin{array}{*{20}{c}} { - 2}\\ 0\\ { - 3} \end{array}} \right)\) et \(\overrightarrow {AC} \left( {\begin{array}{*{20}{c}} 1\\ { - 1}\\ { - 5} \end{array}} \right)\)
\(\overrightarrow {AB} \ne k\overrightarrow {AC} \). Les vecteurs ne sont pas colinéaires. Ils définissent donc un plan.
Déterminons un vecteur normal à ce plan \(\overrightarrow u \left( {\begin{array}{*{20}{c}} a\\ b\\ c \end{array}} \right)\).
D’où le système suivant…
\(\begin{array}{l} \left\{ {\begin{array}{*{20}{c}} { - 2a - 3c = 0}\\ {a - b - 5c = 0} \end{array}} \right.\\ \Leftrightarrow \left\{ {\begin{array}{*{20}{c}} {a = - \frac{3}{2}c}\\ {b = \frac{{13}}{2}c} \end{array}} \right. \end{array}\)
Choisissons \(a=3\). Donc \(c=-2\) et \(b=13\).
Un vecteur normal au plan est \(\overrightarrow u \left( {\begin{array}{*{20}{c}} 3\\ {13}\\ { - 2} \end{array}} \right)\)
Donc le plan \((ABC)\) a pour équation \(3x+13y-2z+d= 0\)
Euh, il reste un « \(d\) » disgracieux…
Remplaçons avec les coordonnées de \(A(1\,;2\,;3)\).
\(3×1+13×2-2×3+d=0\)
D’où \(d=-23\).
Donc une équation du plan \((ABC)\) est \(3 × 1 + 13 × 2 - 2 × 3 - 23\) \(= 0.\)
Lorsque vous avez terminé un exercice comme celui-ci, n’oubliez pas de vérifier si l’équation du plan fonctionne bien avec les trois points. On ne sait jamais...
Note : pour une recherche d'intersection entre un plan et une droite, voir par exemple la page sur le problème avec produit scalaire.
